
Generation of an Image Depth Map Using a Plenoptic Camera
- Undergraduate Research Project
- Student: Steven Carpenter
The plenoptic camera is a tool capable of recording significantly more data concerning a particular image than a conventional camera. This additional data is analyzed to produce several views of a particular phenomenon as though taken at different locations with a single exposure. The separate views are then compared using correlation algorithms on features within a scene to find a disparity map, which may be translated into a depth map using the appropriate inverse relation. This depth map is useful in analytical research with applications to structural vibrations and 3-D flow visualization, providing a means to determine the distance from the camera to a given feature and its fluctuation. The images below show very preliminary results that illustrate a proof-of-concept of the overall technique. Work is ongoing and expected to achieve significant improvements.
 |
 |
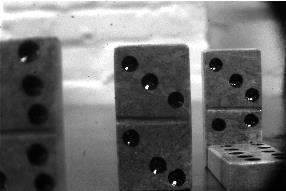
| Baseline image of a set of dominoes placed at varying distances from the camera obtained from the centerpoint view of a plenoptic camera image and the preliminary results of a depth estimation algorithm applied to the images. | |
For more information, please see:
- Carpenter, S., “Depth Estimation with a Plenoptic Camera,” Proceedings of the AIAA 2013 Southeastern Regional Student Conference, Raleigh, North Carolina, April 8-9, 2013.



![]()